
Mentor
Charles Xiao - Mechanical Engineering Hawkes Group
Advisor
Elliot W. Hawkes - Mechanical Engineering Hawkes Group
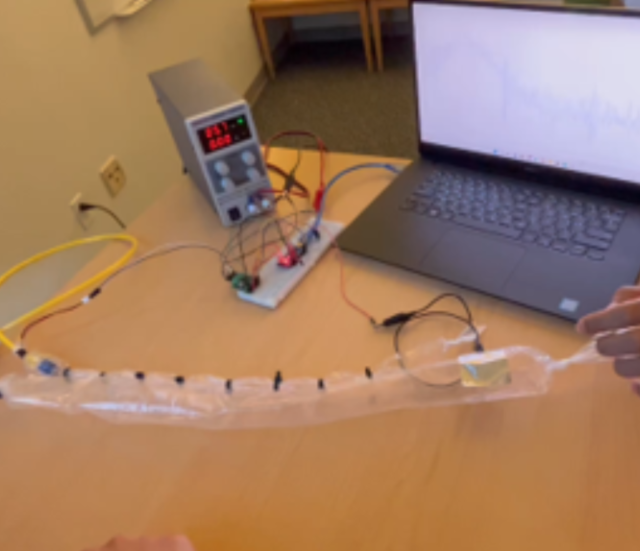
Design and Test of a Soft Muscle
Interns
Daniel Huerta - Biopsychology
May Vu - Electrical Engineering
Hannah Walker - Electrical Engineering
Scott Weston - Electrical Engineering
Project Description
Existing robots are precise and powerful, perfect for doing things like building a car. To achieve such precision, force, and speed requires high stiffness (e.g., metal parts). However, such power poses a risk in situations like medicine and search and rescue. No one likes being crushed by a malfunctioning robot. You want something soft like Baymax from Big Hero 6 for those situations.To create such robots, researchers in the Hawkes lab are developing “soft robots,” robots made from compliant materials like rubbers and plastics. To make these robots move, we need soft actuators (i.e., motors, muscles, etc.). For this project, you will build, test, and model a soft muscle. In the process, you will gain familiarity with basic soft robotics fabrication techniques, programming, and electronics.
Project Files